















 9 / 84
9 / 84

9
MOUSER ELECTRONICS
LA COPERTINA DI EMBEDDED
EMBEDDED
59 • FEBBRAIO • 2016
allocate a tale scopo su scala internazionale. Esse
sono state scelte a causa delle loro caratteristiche di
propagazione del segnale e sono definite onde mil-
limetriche a causa delle lunghezze d’onda estrema-
mente ridotta (da 10 a 1 mm). La regione delle onde
millimetriche inizia a frequenze superiori a 30 GHz
(fino a 300 GHz) ed è ancora relativamente sgom-
bra: frequenze superiori a
40 GHz sono state utilizzate
solamente da alcuni sistemi
scientifici e militari.
Le ragioni sono diverse. La
propagazione del segnale a
onde millimetriche è carat-
terizzato da un range limitato e diminuisce all’au-
mentare della frequenza. Le leggi della fisica inse-
gnano che minore è la lunghezza d’onda, minore
sarà il range di trasmissione a parità di potenza. I
segnali delle onde millimetriche, inoltre, sono sensi-
bili all’attenuazione prodotta da qualsiasi elemento
si trovi di fronte ad essi – dalla pioggia alla neve,
alla nebbia, dal fogliame a qualsiasi struttura soli-
da. Anche in buone condizioni di visibilità reciproca,
il range è di molto inferiore rispetto a quello delle
frequenza più basse usate in applicazioni quali
comunicazioni wirelesse broadcasting dei segnali
radiofonici e televisivi.
Tradizionalmente i sistemi a onde millimetriche
sono costosi da realizzare in quanto i componenti
meccanici come le antenne sono molto piccole e
richiedono un adattamento estremamente preciso.
Inoltre non sono molto i dispositivi a semicondut-
tore capaci di garantire prestazioni accettabili a
frequenze così elevate. Tutti questi svantaggi sono
superabili solamente nel momento in cui viene iden-
tificato un mercato che, grazie a volumi enormi, per-
metta di abbattere i costi e finanziare l’innovazione.
Il mercato della sicurezza in ambito automobilistico
risponde a questo requisito.
Nonostante le caratteristiche sopra menzionate
rendano le onde millimetriche inadatte per parec-
chie applicazioni, il loro impiego nei
sistemi di sicurezza automobilistici porta numerosi vantaggi.
Per esempio le limitazioni in termini di range non
sono valide per ogni frequenza dello spettro delle
onde millimetriche poiché l’assorbimento atmosferi-
co ad alcune frequenze è inferiore rispetto ad altre
frequenze (Fig. 2). Un assorbimento ridotto contri-
buisce ad aumentare il range utilizzabile – anche se
non in misura tale da provocare interferenze diffuse
e anche perché questi “frammenti” spettrali sono
caratterizzati da ampiezza di banda ridotta. Per i
radar impiegati nel settore automobilistico le fre-
quenze più adatte sono comprese tra 71 e 81 GHz.
In passato per alcune applicazioni venivano utiliz-
zati sistemi operanti a una frequenza di 24 GHz
in quanto più economici da realizzare (anche se a
scapito delle dimensioni) ma ora, come evidenziato
dalla tabella 1, si ricorre a sistemi caratterizzati
da frequenze di funzionamento più elevate. Un
ulteriore vantaggio delle onde millimetriche è rap-
presentato dal fatto che per i sistemi radar è richie-
sta una potenza di uscita RF molto bassa, fattore
questo particolarmente importante per l’industria
automobilistica dove i costi rappresentano un fatto-
re critico, senza dimenticare la difficoltà insita nel
generare alti livelli di potenza.
Un radar con un numero ridotto di chip
Grazie ai
bassi livelli di potenza eai progressi
compiuti nel campo della fabbricazione dei semi-
conduttori è ora possibile realizzare un transceiver
radar completo con un numero ridotto di dispositivi.
Un modulo radar è composto da un trasmettitore,
un VCO (Voltage Controlled Oscillator - oscillatore
controllato in tensione) e circuiti integrati di ricezio-
ne, oltre a un microcontrollore (MCU). I chip sono
collegati attraverso un oscillatore locale operante a
una frequenza di circa 38 GHz. Tutti insieme, que-
sti dispositivi possono fornire una soluzione radar
completa e particolarmente efficiente in termini
energetici da utilizzare in sistemi per il controllo
adattativo della velocità di crociera, la frenata d’e-
mergenza, l’avviso del superamento della corsia di
marcia e il rilevamento dei punti ciechi.
Veicoli autonomi: il traguardo finale
L’elenco delle funzioni di sicurezza a bordo delle
automobili che richiedono la presenza di sensori
è lungo e in costante aumento. Collettivamente
queste funzioni sono identificate con l’acronimo di
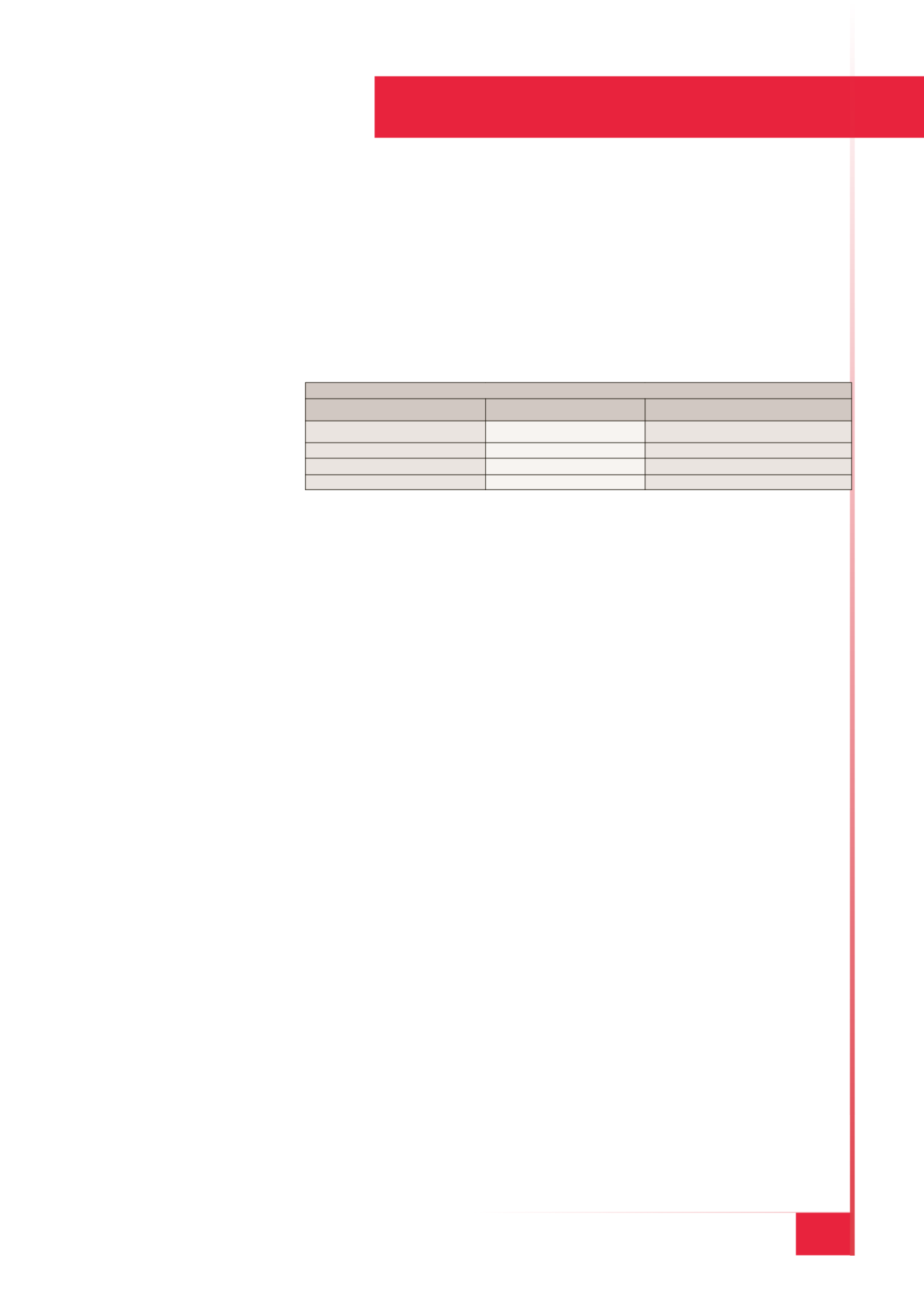
Tabella 1 – Esempi di applicazione dei radar veicolari e relative frequenze di funzionamento
Applicazione
Range di rilevamento (m) Frequenza di funzionamento (GHz)
Controllo adattativo
della velocità di crociera
200
77
Pre-crash
30
24, 76, 77, 81
Rilevamento del punto cieco
20
24
Stop & Go
30
24, 76, 77, 81