















 10 / 84
10 / 84

EMBEDDED
59 • FEBBRAIO • 2016
LA COPERTINA DI EMBEDDED
MOUSER ELECTRONICS
10
ADAS (Advanced Driver Assistance System)che
include praticamente tutto, dalla prevenzione delle
collisioni agli avvisi di superamento della corsia,
dalle telecamere di retromarcia ai sistemi espres-
samente ideati per rilevare la corretta percezione
della situazione (awareness) da parte guidatore.
Mentre alcune funzioni rilevano semplicemente
rischi imminenti, altre sono espressamente con-
cepite per prevenirli, alla stessa stregua dei quel
che accade per gli aerei commerciali. Uno degli
elementi che riveste un’importanza cruciale per
la realizzazione di veicoli realmente autonomi è la
capacità dei veicoli stessi di comunicare sia con gli
altri veicoli sia con le reti come ad esempio Wi-Fi o
sistemi cellulari. Nessun tipo di sensore, sia RF sia
ottico, dispone del range o del campo visivo necessa-
ri per localizzare più di dieci macchine che seguono
o precedono quella su cui sono installati: per questa
ragione i sistemi V2V (Vehicle-to-Vehicle) o V2I
(Vehicle-to-Infrastructure) sono essenziali per tra-
durre in realtà il concetto di autonomia.
Nei sistemi V2V, due o più veicoli che si trovano
all’interno di un range di comunicazione accettabile
stabiliscono automaticamente una connessione in
modo da dar vita a una rete “ad hoc”. Essi possono
quindi trasmettere e ricevere dati relativi alla loro
posizione, velocità e direzione reciproche. Poiché
questo tipo di rete permette a tutti i partecipanti di
agire alla stregua di router, essi possono collegarsi
ad altri veicoli più lontani. Il sistema nel suo com-
plesso deve essere in grado di prendere decisioni in
tempi brevi e in modo autonomo, così da permettere
la creazione e l’invio tempestivi di segnali di avver-
timento.
I sistemi V2I permettono di ampliare il range e la
tipologia di dati che è possibile includere nel pro-
cesso decisionale integrando un’ampia gamma di
infrastrutture diverse, raccogliendo dati circa le con-
dizioni del traffico e della strada e “raccomandando”
azioni specifiche che i veicoli presenti in una data
area dovrebbero compiere. Tutto ciò dovrebbe pre-
sumibilmente comportare anche una riduzione dei
consumi e delle emissioni. Queste raccomandazioni
potrebbero essere trasferite ai guidatori attraverso
pannelli informativi o tramite segnali esterni (o
entrambi). In una situazione ideale questi suggeri-
menti potrebbero tradursi in azioni prese non dal
guidatore bensì dal veicolo stesso, con l’obiettivo di
conformarsi alle normative stabilite dalla convezio-
ne di Vienna che disciplinano il traffico stradale e
a cui si ispirano e si adeguano i codici della strada
nazionali. I sistemi V2V sono stati progettati per
operare nella gamma di frequenze comprese tra
5,85 e 5,925 GHz (banda a 5,9 GHz),riservata
dal Congresso americano per questo scopo (ovvero
per le comunicazioni veicolari) e successivamente
armonizzata con l’Unione europea e con altri Paesi.
Sebbene siano stati proposti numerosi standard
di comunicazione, quello più accreditato è IEEE
802.11p (una variante di IEEE 802.11) espressa-
mente concepito per soddisfare i criteri dei sistemi
ITS (Intelligent Transportation Systems). In par-
ticolare, poiché un veicolo in movimento e le infra-
strutture stradali devono essere in grado di comu-
nicare per un tempo molto breve, lo standard IEEE
802.11p permette lo scambio dei dati senza prima
essere autenticato. Per contro, le operazioni di rice-
zione e trasmissione possono iniziare nel momento
stesso in cui sono rilevate. Poiché questa modalità
non è prevista dal protocollo IEEE 802.11 standard,
era necessario introdurre una variante che è stata
appunto identificata con la lettera p. Quest’ultima
fa parte della famiglia di standard IEEE 1609 per le
comunicazioni wireless in ambienti veicolari (Wave
- Wireless Access in Vehicular Environments) che
definiscono architettura, modello di comunicazione,
struttura di gestione, meccanismi di sicurezza e
accesso fisico per comunicazioni a bassa latenza che
avvengono a una velocità massima di 27Mb/s in un
range che può arrivare a 1.000 metri.
Sempre più dati dalle fonti
L’obiettivo dei sistemi ITS è sicuramente ambi-
zioso, considerando tutti i soggetti coinvolti (dati,
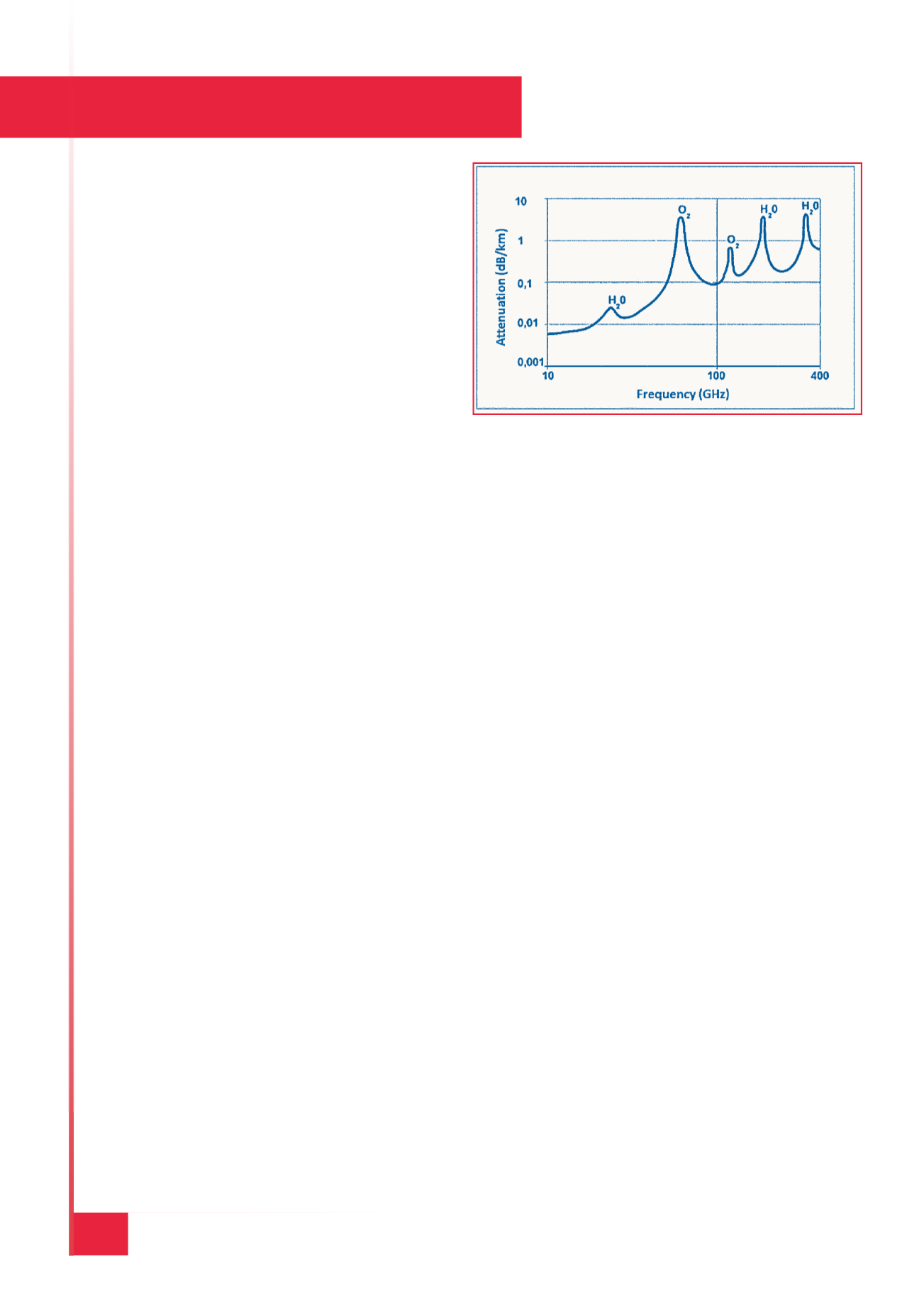
Fig. 2 – Nella gamma compresa tra 70 e 100
GHz l’attenuazione diminuisce, con conseguente
aumento del range di comunicazione ottenibile
(fonte:
https://commons.wikimedia.org/wiki/)