















 62 / 84
62 / 84

EMBEDDED
59 • FEBBRAIO • 2016
SOFTWARE
|
PIL TEST
62
zioni, partendo da casi di test basati sui requisiti.
Un’applicazione creata a partire da un modello
si può anche verificare mediante metodi di test
back-to-back, che confrontano fra loro la risposta
del modello e dell’applicazione.
I modelli possono essere usati con diverse modali-
tà di simulazione per scopi di verifica e validazio-
ne [7]. Il termine SIL fa riferimento all’esecuzione
in ambiente host di un’applicazione basata su un
modello. Durante la simulazione vengono inviati
stimoli di test all’applicazione e i valori di ritorno
vengono misurati e verificati. Le simulazioni PIL
sono estensioni dirette di questo procedimento.
In questo caso un’applicazione viene compilata
per l’utilizzo in un conseguente ambiente target,
ed eseguita su una piattaforma hardware o in un
simulatore. L’ultimo stadio del testing basato su
modelli è la simulazione HIL (hardware-in-the-
loop), in cui l’applicazione viene testata in un
ambiente hardware complesso. Tutte le modali-
tà permettono di eseguire
un testing back-to-back in
cui gli stessi stimoli di test
vengono iniettati al model-
lo e all’applicazione, per
poi confrontare i valori di
uscita di entrambi. Se per
la simulazione si usa un
modello eseguibile, il me-
todo viene chiamato MIL
(model-in-the-loop).
Per non essere costretti
ad aumentare la comples-
sità del test a causa delle
troppe differenze fra i due
ambienti, l’obiettivo dovrebbe essere integrare il
prima possibile la simulazione PIL nella proce-
dura di test. Le schede hardware dimostrative
rappresentano una soluzione hardware facil-
mente accessibile per questo problema.
Simulazione PIL con Simulink
L’ambiente di modellazione Simulink permette
all’utente di creare modelli eseguibili con l’aiu-
to di un’interfaccia grafica, e di testare i modelli
secondo varie modalità di simulazione. Nel caso
di PIL, occorre integrare un blocco speciale nel
modello già esistente. Il compito del blocco PIL è
collegare l’ambiente target a Simulink e control-
lare sulla piattaforma target l’esecuzione dell’al-
goritmo da verificare [8].
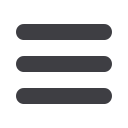
La funzionalità del blocco PIL è determinata da
una funzione-S personalizzabile, che contiene
un insieme di callback utilizzate per l’integra-
zione con l’ambiente target (Fig. 3). A tal scopo
Fig. 3 - PIL con Simulink
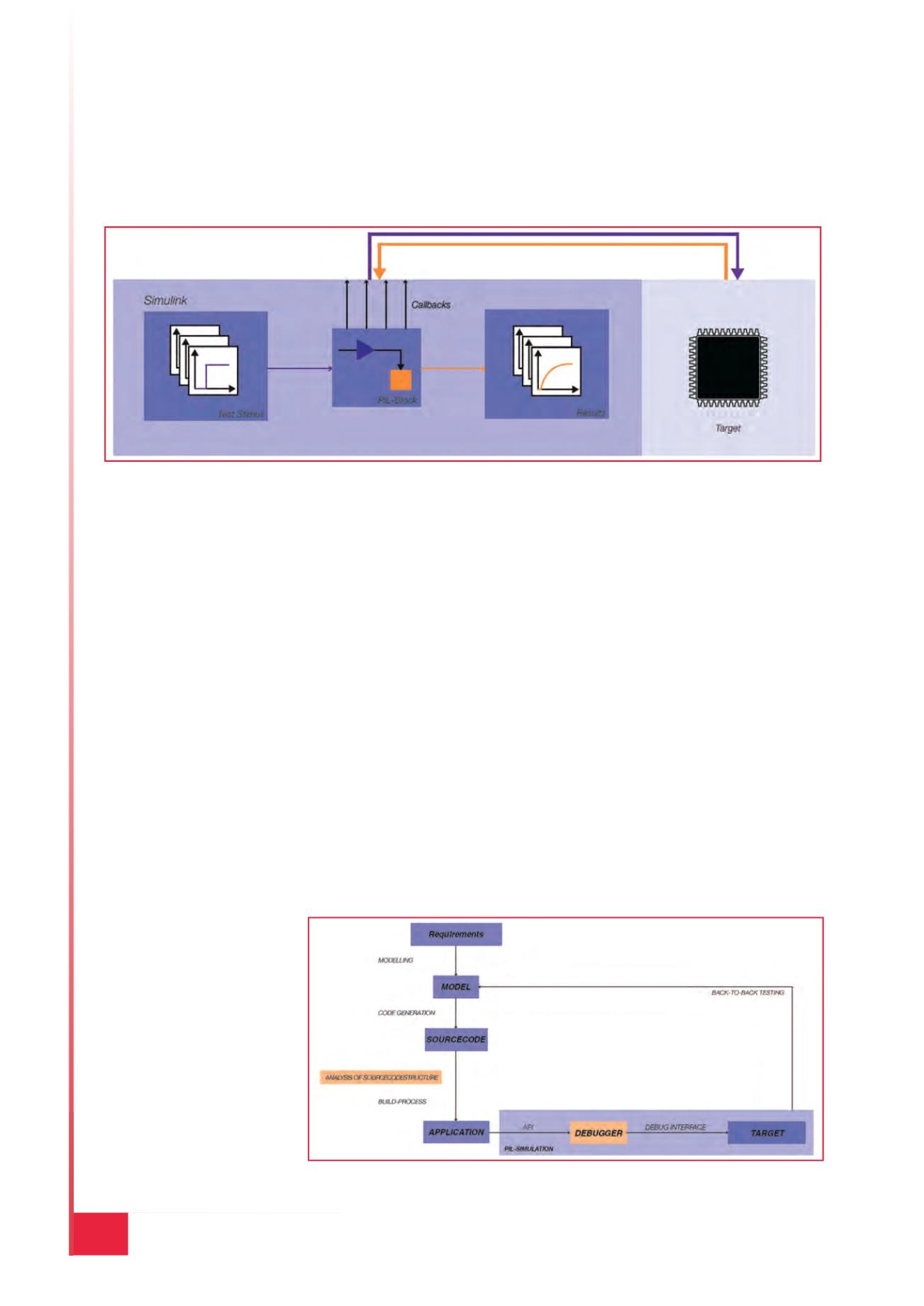
Fig. 4 - Progetto di un’interfaccia d’integrazione