
















 74 / 84
74 / 84

SETTEMBRE 2017
FIELDBUS & NETWORKS
74
thercat, il cui nome sta per ‘
Ethernet for Control Automation
Technology
’, definito anche come ‘il fieldbus Ethernet’, è sup-
portato e sviluppato continuamente da ETG (Ethercat Techno-
logy Group), che conta circa 3.000 membri in tutto il mondo. Si
tratta del resto, secondo alcuni, della rete Ethernet industriale
in tempo reale più veloce attualmente disponibile: una reputazione meri-
tata per un protocollo che è stato sviluppato focalizzandosi principalmente
sulla brevità dei tempi di ciclo. E considerando che nelle applicazioni di
motion control la velocità è tutto, Ethercat si propone come soluzione ide-
ale. Il protocollo si presta inoltre all’interfacciamento di molti altri tipi di
dispositivi slave in campo, per esempio azionamenti, I/O, sensori, valvole,
sistemi di visione e componenti meccatronici. Fra numerosi vantaggi,
Ethercat offre due caratteristiche particolarmente utili per le reti di motion
control: elevata efficienza nella trasmissione di dati e sincronizzazione del
clock con velocità e precisione notevoli. La chiave del funzionamento di
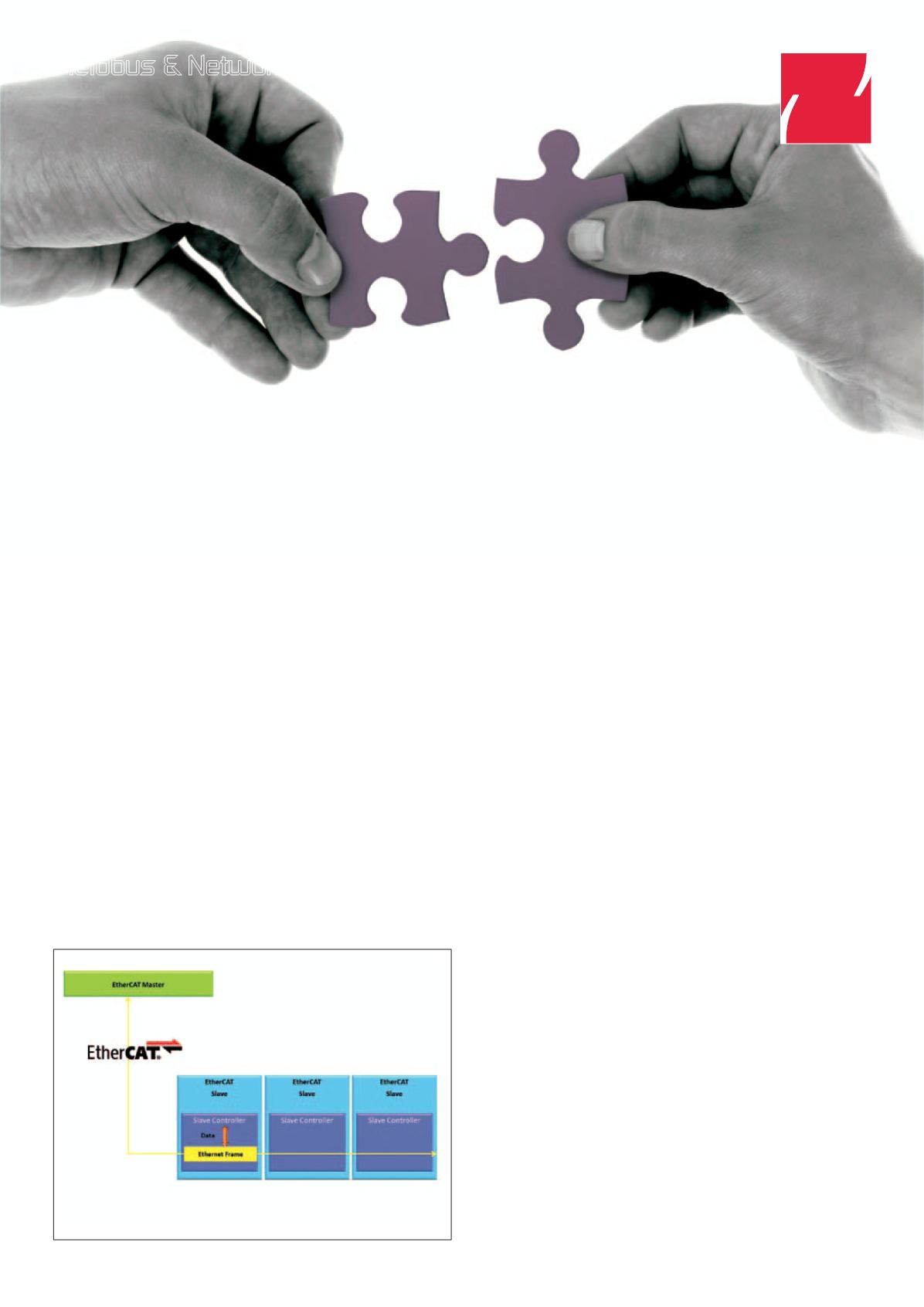
Ethercat sta nella modalità di elaborazione dei frame Ethernet. Ciascun
nodo legge i dati a esso indirizzati e li riscrive nel frame mentre questo
passa attraverso il dispositivo (si veda Figura 1). Questa tecnica consente
di superare i limiti intrinseci di Ethernet, poiché il frame (‘pacchetto’) di
dati non viene più rallentato in ogni nodo, sfruttando meglio la larghezza
di banda. In questo modo, infatti, un frame per ciclo è spesso sufficiente
per la comunicazione ed Ethercat diventa un protocollo molto veloce
con prestazioni elevate. Oltre a ciò, Ethercat è adatto per architetture di
sistema sia centralizzate sia distribuite. Può supportare comunicazioni
master/slave, master/master e slave/master, oltre a integrare sistemi
fieldbus subordinati. Grazie alla sua topologia flessibile (linea, bus, al-
bero o combinazioni diverse), inoltre, può supportaremigliaia di dispositivi
senza limitazioni topologiche. La distanza fra due dispositivi può arrivare
fino a 100 metri e può essere ulterioremente aumentata utilizzando colle-
gamenti in fibra ottica. Collegamenti e sostituzioni ‘a caldo’ (hot swap) e
topologia ad anello ridondante completano il quadro delle caratteristiche
salienti. In sintesi, Ethercat supporta le normali tecnologie Ethernet senza
incidere negativamente sulla funzionalità in tempo reale della rete; il pro-
tocollo ‘Ethernet over Ethercat’ trasporta FTP, http e TCP/IP; la sicurezza
funzionale è integrata direttamente nel bus con ‘Fail safe over Ethercat’.
Il consorzio Ethercat è molto attento alla conformità e all’interoperabilità.
Oltre a richiedere test di conformità per ogni dispositivo implementato,
infatti, ETG svolge diverse attività per garantire l’interoperabilità fra di-
spositivi Ethercat master e slave.
Ethercat supporta l’Industria 4.0
L’automazione industriale è sempre più pervasiva grazie all’introduzione
di nuove tecnologie. Oltre a un numero crescente di dispositivi IIoT (Indu-
strial Internet of Things) stiamo assistendo a sviluppi continui nell’ambito
delle reti m2m, dei sensori a basso costo e della connettività wireless.
Per realizzare sistemi con capacità adattive e ottimizzare il controllo degli
Fieldbus & Networks
Building
blocks
ETHERCAT: ‘IL’
FIELDBUS ETHERNET
ETHERCAT È IL PROTOCOLLO IDEALE PER MOLTE APPLICAZIONI DI MOTION
CONTROL E DI AUTOMAZIONE INDUSTRIALE IN GENERALE, IN VIRTÙ
DELLE SUE CARATTERISTICHE DI VELOCITÀ, DETERMINISMO E AFFIDABILITÀ
di
Marika Silla
Fonte: www.pixabay.com
E
Figura 1 - Elaborazione in Ethercat di frame (pacchetti) dati
Ethernet