
















 96 / 102
96 / 102

MAGGIO 2017
FIELDBUS & NETWORKS
96
Fieldbus & Networks
Nel corso degli anni, infatti, altri bus hanno successivamente fatto la
loro comparsa sul panorama automotive; le aggiunte più importanti
comprendono FlexRay, che si presenta come contendente di CAN per
la realizzazione di funzioni critiche, LIN (Local Interconnect Network),
che costituisce una soluzione economica per le funzioni non critiche
più semplici, Most (Media Oriented System Transport), orientato alle
applicazioni di infotainment, ed Ethernet che ha le potenzialità per oc-
cupare tutti i campi.
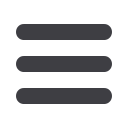
All’interno di una singola autovettura sono solitamente presenti più tec-
nologie di comunicazione, di conseguenza più gateway che consentono
il transito delle informazioni da un sottosistema all’altro.
La tecnologia CAN
Nella sua concezione originale, CAN nasce come bus multidrop e multi-
master orientato ai contenuti originati da eventi. Questa struttura a bus,
in cui ogni nodo è indipendente e può iniziare le trasmissioni quando lo
ritiene opportuno, ben si presta alle realizzazione di sistemi robusti, in
grado di tollerare il malfunzionamento, la rimozione o l’aggiunta di uno
o più nodi. Proprio per questo, i nodi sono sprovvisti di indirizzo esplicito,
mentre il protocollo è orientato al contenuto e prevede la trasmissione
in broadcast di messaggi dotati di un identificatore che ne caratterizza
la priorità. Il meccanismo di arbitraggio è non distruttivo e permette ai
messaggi con priorità più elevata di essere trasmessi prima degli altri
sul bus; gli altri nodi in ascolto possono usare filtri hardware o software
per selezionare i messaggi di interesse.
Il campo dati dei messaggi è volutamente piccolo: lo standard originale
prevede un massimo di 8 byte, la cui correttezza può essere verificata
per mezzo di un controllo ciclico di parità. CAN è ottimizzato per tra-
smettere piccole quantità di informazioni alla volta, una modalità che
ben si adatta allo streaming rapido dei parametri
monitorati in una rete di sensori e attuatori su un
automezzo. La trasmissione può essere su richie-
sta o ciclica; considerando che una rete veicolare è
tipicamente lunga meno di 40 m in un’automobile
e meno di 200 m in un veicolo commerciale, il bus
CAN offre una velocità di trasmissione sufficiente-
mente alta, da rendere i tempi di ciclo adatti anche
ad applicazioni critiche.
Per quanto riguarda lo strato fisico, le specifiche
originali lasciavano i progettisti essenzialmente li-
beri di scegliere l’implementazione più adatta alla
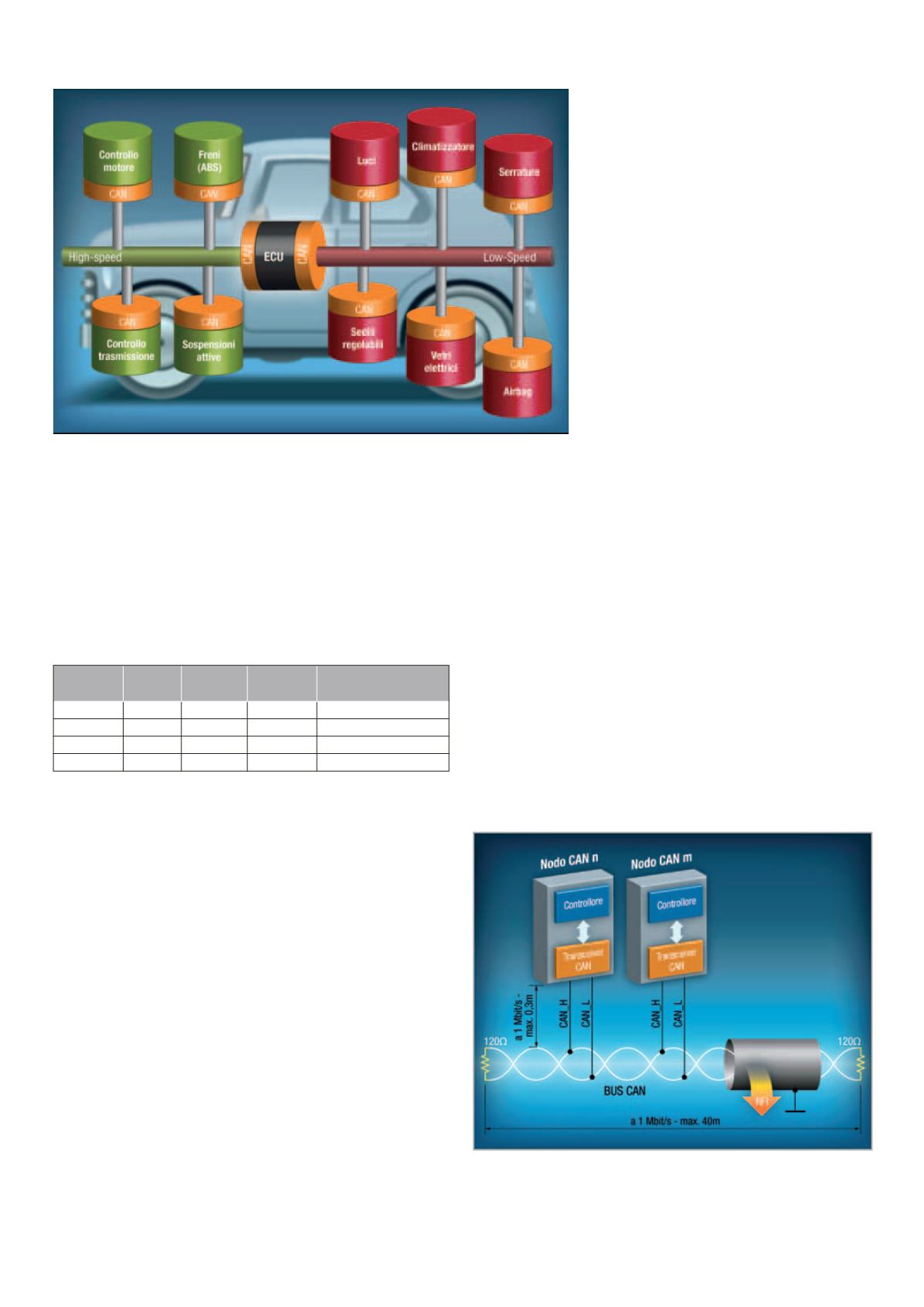
specifica applicazione. Nelle sue incarnazioni più
comuni, il bus CAN utilizza un semplice doppino
intrecciato (UTP o STP) per trasmettere un segnale
di tensione differenziale rispetto a una massa co-
mune. Il bus è costituito da due fili che possiamo
chiamare Can-Hi e Can-Lo, ai quali afferiscono i
vari nodi.
Per rendere il più possibile insensibile alle inter-
ferenze il segnale, i livelli di tensione sulle linee Can-Hi e Can-Lo sono
modificati in maniera simmetrica, così che la loro differenza fornisca la
massima escursione del segnale. Nella versione High-Speed, il livello
di riposo per entrambe le linee è tipicamente di 2,5 V e corrispondente
allo stato recessivo del bus (valore logico 1, differenza dei segnali 0
V nominali); il valore logico 0, corrispondente allo stato dominante, si
realizza portando la linea Can-Hi a 3,5 V e quella Can-Lo a 1,5 V, deter-
minando così una differenza tra le linee di 2 V nominali. Nella versione
Fault-Tolerant le tensioni sulle linee Can-Hi e Can-Lo sono allontanate
dal livello mediano anche per lo stato recessivo.
Un altro punto di forza di CAN è il meccanismo di arbitraggio non di-
struttivo, che permette di risolvere le collisioni (il protocollo viene in-
fatti indicato come Csma-CR+AMP: Carrier Sense Multiple Access and
Collision Resolution with Arbitration on Message Priority). Tutti i nodi
sono connessi al bus in una modalità logicamente equivalente a un
AND cablato. Questo significa che è sufficiente un solo nodo che im-
metta sul bus lo stato logico 0 (dominante), per trascinare con sé tutto
Sul medesimo automezzo coesistono una molteplicità di reti, non necessariamente
CAN, che possono dialogare tra loro per mezzo di gateway
Tabella 1: Selezione di standard di comunicazione impiegati in
ambito automobilistico
CAN è un bus multidrop multimaster orientato ai messaggi con un
accesso al mezzo di tipo Csma-CR+AMP. Il mezzo trasmissivo di
elezione è il doppino intrecciato con impedenza caratteristica di
120 Ohm (a seconda della variante, le terminazioni possono non
essere richieste)
Standard
Classe
SAE
Vel. max Real Time
Riferimenti
LIN
A
19,6 kbps soft
www.lin-subbus.orgCAN
A B C 125 kbps soft
www.can-cia.orgTT-CAN C (D)
10 Mbps hard
FlexRay
C (D)
10 Mbps hard
www.flexray.com