
















 100 / 102
100 / 102

MAGGIO 2017
FIELDBUS & NETWORKS
100
Fieldbus & Networks
niere possono portare alla potenziale rottura di uno dei fili di collega-
mento. La quarta parte delle specifiche ISO 11898,
‘4 - Time-triggered
communication’
, descrive una variante di CAN che implementa un mec-
canismo di comunicazione a slot temporali, adatta a volumi sostenuti
di traffico. La quinta e sesta parte introducono una modalità di ridu-
zione dei consumi per le versioni a bassa e alta velocità (
‘5 - Highspeed
medium access unit with low-power mode’
) e un meccanismo di
wake-up selettivo per la versione high-speed (
‘6 - CAN High-speed
medium access unit with selective wake-up functionality’
).
La variante CAN-FD, in grado di supportare pacchetti dati di grandi di-
mensioni, è stata standardizzata a fine 2015 ed è inclusa nelle specifi-
che ISO 11891-1:2015.
Esistono altri standard ISO che si occupano di CAN nel mondo auto-
motive: ISO 15765 descrive uno standard per la diagnostica di bordo
che utilizza il bus CAN, mentre ISO 11992 definisce una connessione
punto-punto per la versione robusta a bassa velocità (<125 kbps), che
trova applicazione nelle comunicazioni tra veicoli e rispettivi rimorchi
destinati al mercato automobilistico europeo.
Gli standard SAE
Negli Stati Uniti le incarnazioni del bus CAN che hanno peso in ambito
automotive sono quelle codificate dalla locale Society of Automotive
Engineers. Gli standard SAE J2284 (1, 2 e 3) descrivono lo strato fisico
delle reti CAN a 125 kbps, 250 kbps e 500 kbps, tipicamente indicate
con i nomi di CAN-A, CAN-B e CAN-C, in cui la lettera finale è un rife-
rimento alla classe di appartenenza con cui SAE indica la velocità dei
bus (da non confondersi con le lettere A/B che indicano la lunghezza
dell’identificatore nelle specifiche CAN 2.0). I sistemi SAE di Classe A
viaggiano a una velocità massima di 10 kbps e sono tipicamente utiliz-
zati per applicazioni non critiche (motori dei finestrini, chiusure, riscal-
damento sedili). I sistemi di Classe B hanno velocità di trasmissione
comprese tra 10 e 125 kbps e sono in genere usati per trasmettere
informazioni descrittive, come i valori visualizzati dalla strumentazione
del cruscotto o i dati sulle emissioni inquinanti. La Classe C riguarda i
sistemi critici che richiedono velocità superiori a 125 kbps, in particolare
la variante High-Speed di CAN a 500 kbps SAE J2284-3, che gestiscono
il funzionamento del motore, l’assetto del veicolo, il sistema di frenata
e il servosterzo.
Lo standard SAE J2411, noto anche con il nome di Single-Wire CAN o
SW-CAN, rappresenta una variante del bus CAN Low-Speed a un solo
filo che opera alla velocità nominale di 33,3 kbps. La comunicazione
avviene su un singolo cavo non schermato, con l’ovvio ritorno di massa
rappresentato dal telaio dell’autovettura, e il protocollo contempla la
possibilità di porre una parte dei nodi in uno stato di sospensione. La
principale applicazione è nel controllo degli accessori a bordo degli au-
toveicoli. Le specifiche J1939, pubblicate da SAE nel 1998, descrivono
invece i protocolli di livello superiore, che permettono di realizzare reti
basate su CANHigh Speed nei veicoli pesanti. Nato come estensione di
due vecchi protocolli basati sull’interfaccia seriale RS485 (gli standard
SAE J1708 e J1587), lo standard J1939 è utilizzato in Nord America
per mezzi pesanti a trazione diesel, autotreni, autobus, mezzi agricoli
e militari.
Altri protocolli derivati da CAN
Il bus CAN costituisce le fondamenta di una moltitudine di altri stan-
dard, che definiscono gli strati superiori dello stack di comunicazione
per aggiungere funzionalità specifiche. Uno di questi è Canopen, lo
strato applicativo nato pensando ad applicazioni automotive e al con-
trollo industriale, sviluppato e mantenuto da CiA (CAN in Automation)
e descritto dalla normativa europea EN 50325-4. Canopen specifica dei
profili di comunicazione e di dispositivo che definiscono rispettivamente
i meccanismi di comunicazione e la configurazione dei nodi per appli-
cazioni specifiche. Il profilo CiA 413 di Canopen, per esempio, specifica
nelle sue varie parti lo strato fisico, le modalità di comunicazione, la
configurazione delle apparecchiature frenanti e di trazione, i profili di
interfaccia dei gateway verso altri bus automotive e le caratteristiche
dell’interfaccia HMI per le reti sui veicoli pesanti. Isobus, standardiz-
zato come ISO 11783, è un altro bus automotive che si appoggia all’in-
frastruttura di J1939 e trova applicazione su trattori e altre macchine
impiegate in agricoltura.
CAN ha fatto la sua comparsa anche nei sistemi di diagnostica automo-
bilistica, essendo uno dei cinque protocolli adottati nello standard eu-
ropeo di comunicazione per la diagnostica di bordo Eobd e dall’analogo
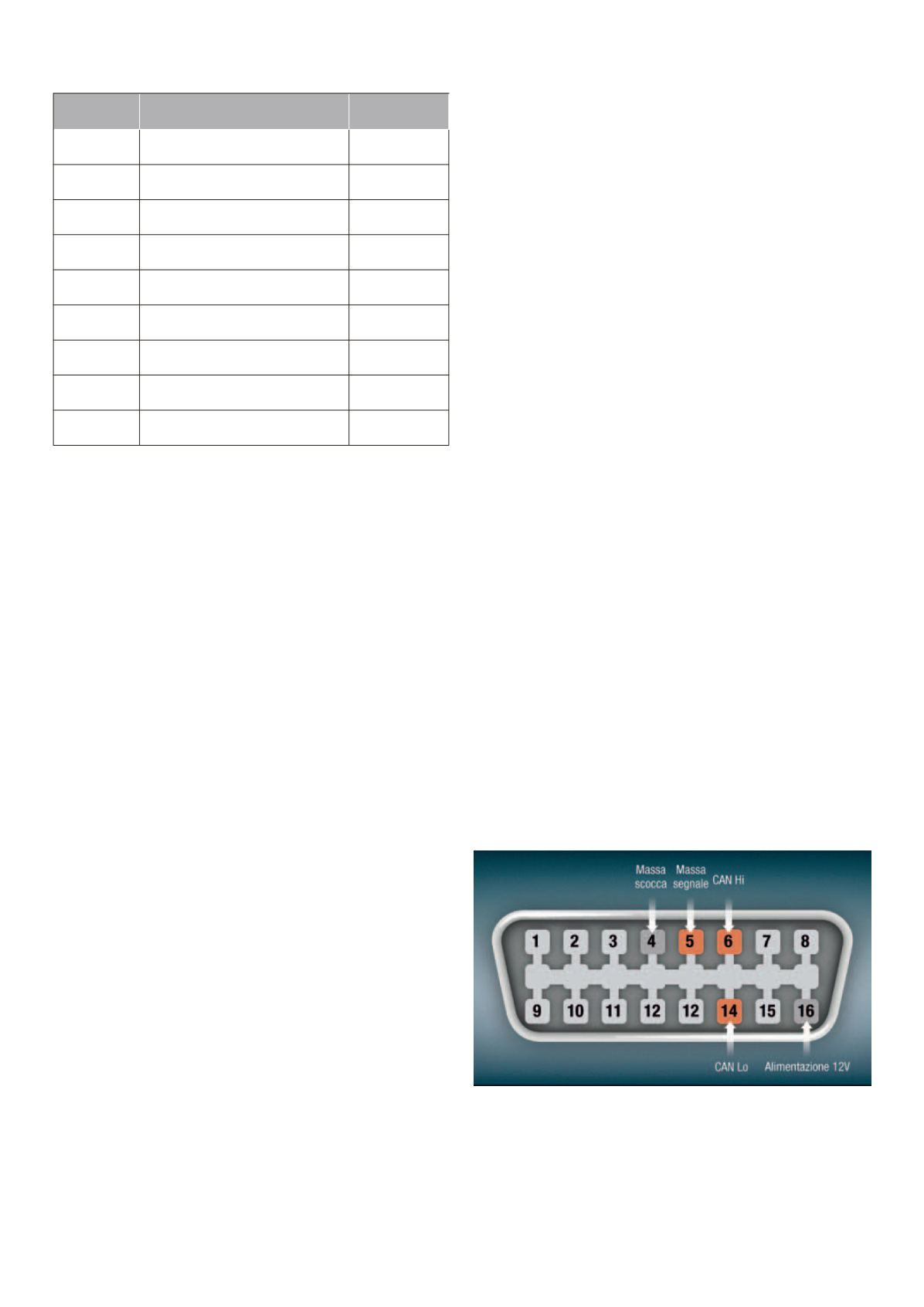
standard statunitense OBD-II. Lo specifiche OBD caratterizzano il tipo di
segnali, di codifiche e di messaggi, nonché il modello e la piedinatura
del connettore da utilizzare per accedere ai dati diagnostici.
Il connettore diagnostico OBD, situato alla destra del volante della vet-
tura, permette di collegare un computer alla centralina di controllo del
mezzo, per accedere alle informazioni diagnostiche raccolte dalle varie
reti di bordo.
Posizione dei terminali del bus CAN sul connettore OBD per la
diagnostica di bordo
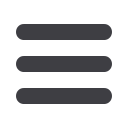
Standard
Classe
SAE
Vel. max
ISO 11898-2
CAN ad alta velocità (HS, high-speed)
1 Mbps
ISO 11898-3
CAN resiliente a bassa velocità
(FT, fault-tolerant)
125 kbps
ISO 11898-4
CAN per comunicazioni sincrone
(TT, Time Triggered)
10 Mbps
ISO 11992-1
CAN resiliente per comunicazioni
con rimorchi
125 kbps
ISO 11783-2
per mezzi agricoli (Isobus)
250 kbps
SAE J1939-11
STP, per mezzi pesanti
250 kbps
SAE J1939-15
UTP, per mezzi pesanti
250 kbps
SAE J2411
Single-wire CAN (SWC)
33.3 – 83.3 kbps
ISO 15765
CAN per applicazioni diagnostiche
(OBD)
1 Mbps
Tabella 2: Protocolli basati o derivati da CAN per applicazioni
automotive