

















 13 / 84
13 / 84

FEBBRAIO 2016
FIELDBUS & NETWORKS
13
Cover story
Beckhoff Automation
Un progetto che nasce
dalla fibra ottica
A dire il vero, gli albori di Ethercat
risalgono a molto prima del fatidico
2003 che abbiamo precedente-
mente citato. Già alcuni anni prima,
infatti, uno dei fronti, insieme a
quello della PC based automation,
sul quale Beckhoff era pionieristica-
mente impegnata, era quello della
comunicazione veloce, in relazione
alla quale nel 1989 aveva rilasciato
una delle sue primissime soluzioni.
Si trattava del primo bus di campo
Beckhoff che, oltre all’utilizzo di un
singolo conduttore in fibra ottica,
basava le sue prestazioni, allora
straordinarie, sul principio fun-
zionale dell’elaborazione ‘on-the-
fly’, al volo. Forse i tecnici con più
esperienza alle spalle se lo ricor-
dano ancora: il titolo del progetto,
dal quale scaturì poi Ethercat, era
Fast Lightbus. Il principio era tanto
semplice quanto efficace: anziché
utilizzare una miriade di connessioni e I/O per interfacciare i vari di-
spositivi distribuiti sul campo, il sistema si basava sulle prestazioni di
una singola scheda di comunicazione all’interno del PC, consentendo
di gestire in maniera decisamente più razionale e soprattutto veloce
la comunicazione con le periferie dislocate localmente lungo il pro-
cesso. Questo concetto ha successivamente guidato lo sviluppo di
Ethercat nel corso degli anni a venire, che oggi è per l’appunto giunto
all’attuale versione Ethercat P mantenendo intatti, oltre ai principi di
base, la piena compatibilità con le versioni precedenti.
Bus di campo
o infrastruttura
tecnologica?
Dire che Ethercat P è un bus di campo
è decisamente una definizione ridut-
tiva. Per due motivi almeno. Il primo
è legato alla peculiarità di Ethercat
P di rendere la comunicazione e i
meccanismi che la governano parte
integrante delle prestazioni comples-
sive di tutto l’insieme, cioè il sistema
Beckhoff.
Il secondo è costituito dal fatto che,
come vedremo, il nuovo Ethercat è
in grado di assolvere a funzionalità
ben più avanzate della sola comuni-
cazione, con prestazioni che ancora
una volta pongono Beckhoff sulla
frontiera più avanzata della tecno-
logia elettronica industriale. Qual è
allora la definizione che meglio si
adatta a descrivere le potenzialità
del nuovo sistema Beckhoff? Eb-
bene, possiamo definire Ethercat P come una soluzione di automa-
zione distribuita basata sulla tecnologia ‘One-Cable’, un’infrastruttura
di trasporto mista dati-potenza, che costituisce un primo e fondamen-
tale passo nella direzione di un diverso concetto di automazione di-
stribuita, orientata alla possibilità di realizzare macchine e impianti
senza quadro di controllo.
In un unico sistema, dunque, l’architettura di comunicazione Ethercat
P integra la trasmissione di dati ad alta velocità e la potenza elettrica
per l’alimentazione dei dispositivi installati in rete, utilizzando un cavo
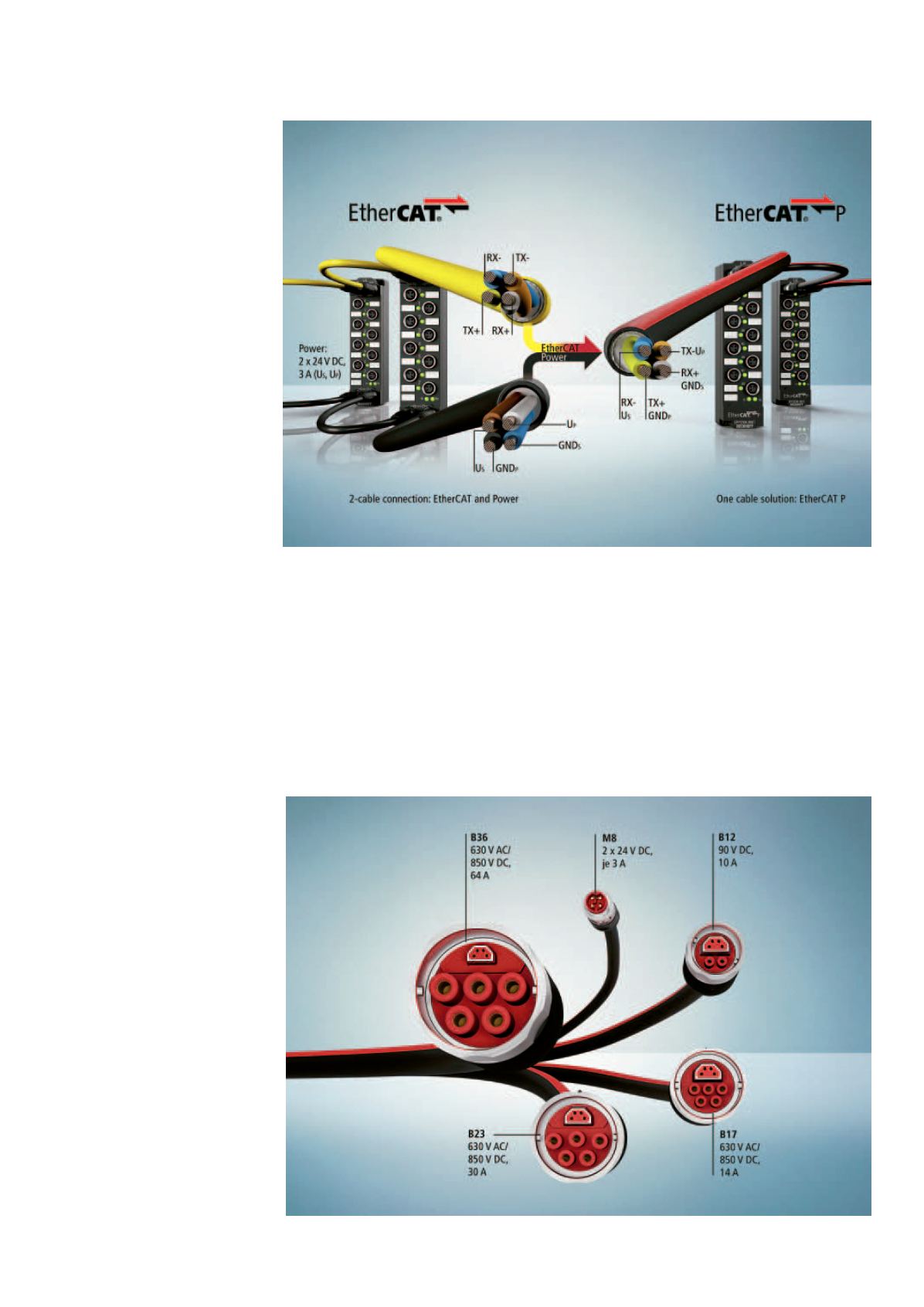
’One Cable Solution’: Ethercat P offre solo vantaggi
Ethercat P: connettori per ogni applicazione